本文介绍了不同的stable diffusion的微调方法
Stable Diffusion 微调方法
| 方法 | 怎么做(原理/操作) | 训练资源需求 | 效果表现 | 适合场景 |
|---|---|---|---|---|
| Full Fine-tuning | 整个模型(U-Net、VAE、CLIP)继续训练 | 很高 | 超强(全面改造) | 训练大数据集、做全新模型 |
| Textual Inversion | 只训练一个新的词向量(嵌入),不改模型参数 | 极低 | 中(单一概念) | 学特定风格、物体、小角色 |
| DreamBooth | 少量图片 + 关键词绑定,微调 U-Net(有时加 Text Encoder) | 中等 | 很强(特定概念) | 个人定制(人物、宠物、角色) |
| LoRA | 冻结原模型,仅训练插入的小矩阵(低秩适配层) | 低 | 强(灵活细致) | 快速训练风格、角色、服装设计 |
| ControlNet | 微调带条件输入的辅助网络(结构分支,不动原模型主干) | 中等 | 很强(结构控制) | 姿态、轮廓、边缘图指导生成 |
1. Textual Inversion
Textual Inversion 是一种著名的扩散模型(如 Stable Diffusion)微调技术,由 Google Research 于 2022 年提出。 它的目标是:
用极少量的数据(通常几张图)让模型学习一个新概念(如新的人、物体、艺术风格)。
核心思路
Textual Inversion 的本质是:
定义一个新的、可学习的词向量(embedding),用它引导扩散模型生成特定概念的图像。
训练流程
- 引入新 token
- 自定义一个新词,如
"<my_cat>",代表你家的猫。
- 自定义一个新词,如
- 只训练词向量
- 冻结模型主体(UNet、VAE、CLIP encoder),仅优化新 token 的词向量。
- 优化目标
- 通过 prompt(如
"A photo of <my_cat> sitting on a chair")生成图像, - 用重建损失(如 MSE Loss)让生成结果接近真实照片。
- 通过 prompt(如
- 训练完成后
- 在任意 prompt 中使用
"<my_cat>",模型即可识别并正确生成!
- 在任意 prompt 中使用
优势总结
- 高效:只训练一个小向量,计算开销极小。
- 稳定:不破坏原模型的通用能力。
- 灵活:让扩散模型学习稀有、个性化元素。
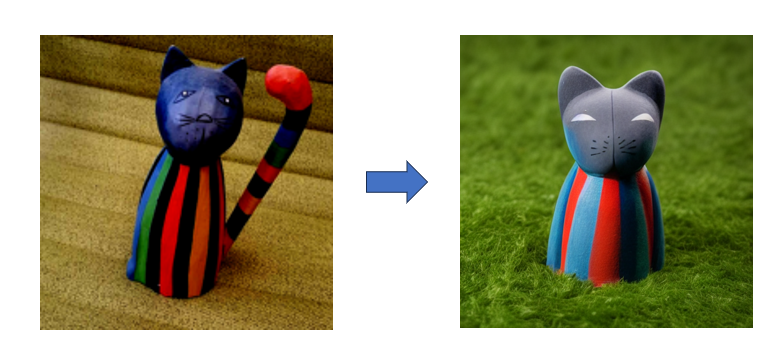
例如:prompt:a
没有用

用了
2. LoRA 微调 Stable Diffusion
1. 什么是 LoRA?
- Low-Rank Adaptation (LoRA) 是一种轻量化微调方法。
- 它通过冻结大模型权重,只引入小的可训练模块(低秩矩阵)来学习新任务。
- 这样可以节省显存、加速训练,且保持大模型原本的能力。
2. 为什么 LoRA 有效?
Stable Diffusion 中,主要微调的是 UNet 和有时的 Text Encoder,它们的权重矩阵通常很大:
$W \in \mathbb{R}^{d_{out} \times d_{in}}$
直接微调 $W$ 代价高。而 LoRA 的做法是:
冻结 $W$,新增可训练的低秩偏置项: \(W' = W + \Delta W\) 其中:
-
$\Delta W = BA$
- $A \in \mathbb{R}^{r \times d_{in}}$
- $B \in \mathbb{R}^{d_{out} \times r}$
- $r \ll \min(d_{in}, d_{out})$
即:只训练 $A$ 和 $B$,且 $r$ 很小(如4、8)
3. LoRA 插入位置(Stable Diffusion)
通常在以下位置加 LoRA:
- UNet 中的 Attention 层(尤其是 Cross Attention)
- 有时在 Self-Attention 层也加
- Text Encoder 层(如 CLIP Encoder)也可以加
Cross Attention 示例:
原始Attention: \(\text{Attention}(Q, K, V) = \text{softmax}\left( \frac{QK^T}{\sqrt{d}} \right)V\) 其中:
- $Q = XW_Q$
- $K = YW_K$
- $V = YW_V$
LoRA应用在 $W_Q$, $W_K$, 或 $W_V$ 上,比如: \(W_Q' = W_Q + B_Q A_Q\) 同理 $W_K$、$W_V$。
4. 超参数推荐
| 参数 | 建议值 |
|---|---|
| rank ($r$) | 4、8、16 |
| learning rate | 1e-4 ~ 1e-5 |
| batch size | 2~8(根据显存) |
| optimizer | AdamW |
| warmup steps | 100~500 |
| clip gradient norm | 1.0 |
5. 训练流程概览
- 加载预训练Stable Diffusion模型。
- 在指定模块(如Attention)插入LoRA层。
- 冻结原模型参数,只让LoRA参数可训练。
- 按常规Diffusion训练流程训练(预测噪声)。
- 保存LoRA权重(小文件)。
6. 推理时使用
推理阶段可以加载LoRA权重并以一定比例融合:
如果融合比例是 $\alpha$,那么: \(W' = W + \alpha \times (BA)\) 一般 $\alpha = 0.5$ ~ $1.0$,可以调整以改变LoRA效果的强度。
# ==== LoRA模块 (只针对Attention里的qkv) ====
class LoRALinear(nn.Module):
def __init__(self, linear_layer, rank=4, scale=1.0):
super().__init__()
self.linear = linear_layer # 原本的Linear层
self.rank = rank
self.scale = scale
self.lora_up = nn.Linear(linear_layer.in_features, rank, bias=False)
self.lora_down = nn.Linear(rank, linear_layer.out_features, bias=False)
nn.init.kaiming_uniform_(self.lora_up.weight, a=math.sqrt(5))
nn.init.zeros_(self.lora_down.weight)
def forward(self, x):
return self.linear(x) + self.scale * self.lora_down(self.lora_up(x))
def apply_lora_to_unet(unet, rank=4, scale=1.0, device='cuda'):
# 先把整个unet所有参数冻结
for param in unet.parameters():
param.requires_grad = False
# 再在需要的地方加LoRA
for name, module in unet.named_modules():
if isinstance(module, SelfAttention):
module.in_proj = LoRALinear(module.in_proj, rank=rank, scale=scale).to(device)
elif isinstance(module, CrossAttention):
module.q_proj = LoRALinear(module.q_proj, rank=rank, scale=scale).to(device)
module.k_proj = LoRALinear(module.k_proj, rank=rank, scale=scale).to(device)
module.v_proj = LoRALinear(module.v_proj, rank=rank, scale=scale).to(device)
可以看到,也能训练出特定的

总结
LoRA 是通过小矩阵 $BA$ 替代大矩阵 $W$ 的微调方法,训练快、参数少,适合对 Stable Diffusion 进行定制和个性化优化。
DreamBooth 微调
1. 什么是 DreamBooth?
DreamBooth 是 Google Research 提出的个性化生成技术, 可以让扩散模型(如 Stable Diffusion)学会特定的个体概念,比如某个人、某条狗、某个物体。
2. DreamBooth 的基本思路
目标: 给定少量特定个体图片(通常3-5张),让模型在生成时能准确重现它,且还能理解 prompt 中的上下文。
怎么做:
- 引入一个新词(比如
sks dog),指代特定个体。 - 微调扩散模型,使它在条件生成时,能把这个新词和特定外观联系起来。
3. DreamBooth 的训练流程
3.1 新词引入
定义一个稀有词(比如 sks),加上类别词(如 dog),组成新prompt:
"a photo of sks dog"
其中:
sks:专门指代你的狗。dog:保持类别的一般特性。
3.2 训练目标 (Loss)
在每一步,模型要学会:
- 在看到
"a photo of sks dog"时,重建带特定特征的图片。 - 保持对其他”dog”类的一般理解,不只记忆这几张图。
主要优化的仍是标准的扩散损失(预测噪声): \(\mathcal{L}_{\text{simple}} = \mathbb{E}_{x, \epsilon, t} \left[ \left\| \epsilon - \epsilon_\theta(x_t, t, c) \right\|^2 \right]\) 其中:
- $x$:原始个体图片
- $t$:时间步
- $\epsilon$:加的高斯噪声
- $c$:prompt编码 (
"a photo of sks dog")
3.3 Class Regularization(类别正则化)
为了避免模型只记住几张图片,DreamBooth引入了类别正则化:
- 额外采样一些类别图像(比如普通的”dog”图像)。
- 用 prompt
"a photo of a dog"来训练,保持类别分布。
对应的类别正则化Loss: \(\mathcal{L}_{\text{class}} = \mathbb{E}_{x_{\text{class}}, \epsilon, t} \left[ \left\| \epsilon - \epsilon_\theta(x_{\text{class},t}, t, c_{\text{class}}) \right\|^2 \right]\)
最终总Loss: \(\mathcal{L}_{\text{total}} = \mathcal{L}_{\text{simple}} + \lambda \mathcal{L}_{\text{class}}\)
- $\lambda$ 是类别正则的权重(一般取 1)
冻结情况
| 模块 | 是否冻结 | 备注 |
|---|---|---|
| UNet | ❌ 不冻结 | 主体微调对象 |
| Text Encoder (CLIP) | ✅ 冻结 | 可选小步微调(很少做) |
| VAE (Autoencoder) | ✅ 冻结 | 不动,负责图像编码/解码 |
| Scheduler | 无需动 | 控制噪声添加/还原 |
4. ControlNet
1. 什么是 ControlNet?
ControlNet 是一种扩展 Stable Diffusion 的方法, 可以在生成图像时增加额外的控制信号,比如:
- 边缘图(Canny)
- 深度图(Depth)
- 姿态估计(Pose)
- 草图(Scribble)
- 分割图(Segmentation)
- …
✅ 这样可以让 Stable Diffusion 不再纯靠 prompt,生成更符合用户期望的内容!
2. ControlNet 的基本思路
在原本 Stable Diffusion 的 UNet 上, 复制一份结构,用来输入控制条件(比如边缘图)。
训练时:
- 把控制输入(比如Canny图)经过一套卷积层,提取特征。
- 在每个 U-Net Block(尤其是中间部分)加上这些特征作为引导。
3. 训练原理(公式)
基本的扩散模型优化是: \(\mathcal{L}_{\text{diffusion}} = \mathbb{E}_{x, \epsilon, t, c} \left[ \left\| \epsilon - \epsilon_\theta(x_t, t, c) \right\|^2 \right]\)
- $c$ 是prompt条件。
加上 ControlNet 之后,目标变成: \(\mathcal{L}_{\text{control}} = \mathbb{E}_{x, \epsilon, t, c, m} \left[ \left\| \epsilon - \epsilon_\theta(x_t, t, c, m) \right\|^2 \right]\)
- $m$ 是控制图(比如canny边缘图的编码特征)。即:让模型不仅根据 prompt,还根据 control 图来预测噪声。
4. ControlNet 网络结构
核心是:
- 原本的UNet主干: 保持预训练权重(可以冻结,也可以微调)
- Control分支: 新加的,专门处理控制输入。

5. 训练时冻结吗?
- 可以选择:
- 完全冻结原UNet,只训练Control分支(收敛快)
- 或者少量微调UNet(效果更好但慢)
大多数官方ControlNet模型:
- UNet权重拷贝 + Control分支单独训练。
6. 推理(使用ControlNet)
推理阶段,需要同时提供:
- 正常的 prompt
- 加上 control 图(比如 Canny 边缘)
生成时,ControlNet 会自动根据控制图引导模型生成内容!
推理示例:
output = model(
prompt="a dog playing guitar",
control_image=canny_edge_image,
)
总结:
ControlNet 是在 Stable Diffusion 基础上增加一个控制分支,使模型在生成时可以根据输入的图像特征引导输出,同时保持原有的自由文本能力。